

Zusammenfassung
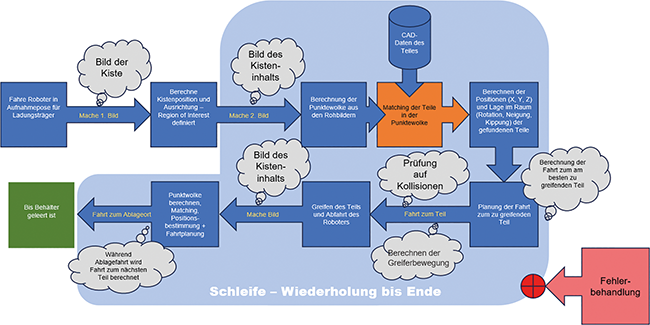
Der erste Teil dieses Beitrags befasste sich mit den technischen Grundlagen einer kamerageführten Robotersteuerung und betrachtete dabei die 3-D-Kameratechnologie sowie die folgende Bildverarbeitung näher. Im vorliegenden zweiten Teil steht eher die Roboterseite im Zentrum. Dabei wird ein wichtiges Thema sein, wie der Workflow mit Robotersteuerungen angelegt ist, um den maximalen Nutzen aus der Anwendung zu ziehen und die im ersten Teil formulierten Anforderungen an eine flexiblere und kleinskalige Produktion effektiv umzusetzen. Neben den Vor- und Nachteilen unterschiedlicher Robotertypen wird zudem ein Ausblick auf das komplexe Thema der Regulierung gegeben. Während die Hardware relativ einfach auf ihre Compliance mit den Regularien für Produktionseinrichtungen geprüft werden kann, muss man bei der Software zur Robotersteuerung genauer hinschauen.
Korrespondenz:
René Purwin
Optonic GmbH, Zollhallenstr. 11, 79106 Freiburg
rene.purwin@optonic.com
 | René Purwin ist seit mehr als 10 Jahren bei Optonic GmbH im Projektmanagement tätig und betreut hier insbesondere alle Projekte für die pharmazeutische Produktion. Sein Hauptaugenmerk liegt darauf, komplette Lösungen zur Verfügung zu stellen – einschließlich aller Dokumentationen und Unterstützung über den gesamten Life Cycle von Automatisierungslösungen hinweg. Zuvor war er rund 20 Jahre für verschiedene führende Unternehmen aus der IT- und Imaging-Branche und als Berater für Marketing, PR und Kommunikation |
Schließen Sie hier ein Abonnement ab und profitieren Sie von den vielseitigen Nutzungsmöglichkeiten.

