
Header

Ihr Suchergebnis
Sie recherchieren derzeit unangemeldet.Melden Sie sich an (Login) um den vollen Funktionsumfang der Datenbank nutzen zu können.
Sie suchen in allen Bereichen nach dem Autor Baum G.
In der Rubrik Zeitschriften haben wir 3 Beiträge für Sie gefunden
-


 Merken
Merken6-Achs-Robotersystem für die aseptische Produktion
(Treffer aus TechnoPharm, Nr. 02, Seite 70 (2018))
Keller M | Baum G | Brückner M | Ringe U | Schweizer M | Berthold L | Bürger F | Gommel U
6-Achs-Robotersystem für die aseptische Produktion / Ganzheitlicher Ansatz einer Eignungsqualifizierung – Teil 2 * Teil 1 des Beitrags ist erschienen in TechnoPharm 8, Nr. 1, 6-10 (2018). · Keller M, Baum G, Brückner M, Ringe U, Schweizer M, Berthold L, Bürger F, Gommel U · Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA, Stuttgart und und
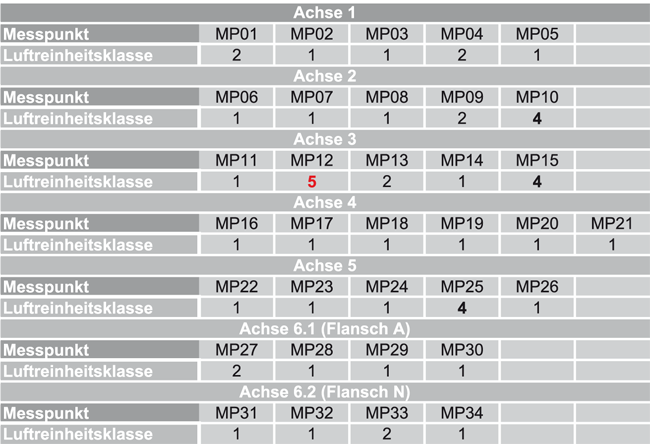
Alle erfassten Daten ergeben die folgenden einzelnen Klassifizierungsdaten gemäß VDI 2083 Teil 9.1 ( Abb. 5 ). Die Gesamtklassifizierung (markiert in rot) basiert auf der Worst-Case-Betrachtung jeder einzelnen Klassifizierungszahl. Laut VDI 2083 Teil 9.1 eignet sich das Robotersystem für den Einsatz in ISO 5-Umgebungen nach ISO 14644-1 [ 2 ] und GMP A-Umgebungen nach Annex 1 des EU-GMP-Leitfadens [ 14 ]. Gemäß dem GMP-Leitfaden darf die für die Herstellung der Produkte verwendete Ausrüstung kein Risiko darstellen [ 14 ]. Kein mit dem Produkt in Berührung kommendes Ausrüstungsteil darf mit diesem so in Wechselwirkung treten, dass die Produktqualität beeinträchtigt wird und damit ein Risiko entsteht. In reinen Bereichen sollten alle exponierten Oberflächen glatt, ...

-
 Merken
Merken6-Achs-Robotersystem für die aseptische Produktion
Rubrik: Maschinen- und Anlagenbau
(Treffer aus TechnoPharm, Nr. 01, Seite 6 (2018))
Keller M | Baum G | Brückner M | Ringe U | Schweizer M | Berthold L | Bürger F | Gommel U
6-Achs-Robotersystem für die aseptische Produktion / Ganzheitlicher Ansatz einer Eignungsqualifizierung – Teil 1 · Keller M, Baum G, Brückner M, Ringe U, Schweizer M, Berthold L, Bürger F, Gommel U · Fraunhofer-Institut für Produktionstechnik und Automatisierung IPA, Stuttgart und und
Reinraumtauglichkeit Partikelemission GMP Hygienic Design Reinigbarkeit Maschine Für eine Vielzahl hygienischer Produktionsszenarien sind die Anforderungen hinsichtlich Kontaminationen extrem hoch. Vor allem in der Herstellung steriler Arzneiprodukte ist es unerlässlich, dass Anlagen und Geräte das Produkt weder mit Partikeln noch mit Mikroorganismen verunreinigen. Um dies zu ermöglichen, werden Anlagen und Geräte in regelmäßigen Abständen desinfiziert und gereinigt. Eine Anlage kann nur effektiv dekontaminiert werden, wenn alle Flächen durch Reinigungs- und Desinfektionsprozesse erreicht werden können. Dafür müssen das Anlagengehäuse und alle betriebenen Komponenten und Schnittstellen entsprechend hygienisch gestaltet werden. Die verwendeten Chemikalien dürfen die verbauten Materialien nicht korrodieren. Eine Ansammlung von Partikeln ...
-
 Merken
MerkenJe glatter desto sauberer?
Rubrik: Reinraum
(Treffer aus TechnoPharm, Nr. 01, Seite 6 (2013))
Keller M | Kreck G | Waldner A | Baum G | Schäffer J
Je glatter desto sauberer? / Wie gut lassen sich Werkstoffoberflächen reinigen? Korreliert die Reinigbarkeit glatter Materialoberflächen mit deren Oberflächenrauheit? · Keller M, Kreck G, Waldner A, Baum G, Schäffer J · Fraunhofer IPA, Abteilung Reinst- und Mikroproduktion, Stuttgart und Uhlmann Pac-Systeme GmbH & Co. KG, Laupheim und
Die Reinigbarkeit der eingesetzten Werkstoffoberflächen für pharmazeutische Verpackungsanlagen ist von besonderer Bedeutung um die Einhaltung der geforderten Reinheitsspezifikationen, die sich beispielsweise aus der Reinigungsvalidierung ergeben, gewährleisten zu können. Tragen sich bei der Produktion Partikel oder gar Mikroorganismen von der Oberfläche an die Produkte ab, kann das verheerende Folgen haben. Maschineneinhausungen, Fußböden, Wände, Transportbehälter, Beschichtungen, … die Liste der relevanten abzureinigenden Oberflächen ließe sich beliebig fortsetzen. Zur Untersuchung der Reinigbarkeit sollen Versuche aufgezeigt werden, welche eine überschlägige prinzipielle Quantifizierung eines Reinigungserfolgs ermöglichen. Die Ergebnisse der Untersuchungen werden in Anlehnung an die ISO/FDIS 14644-9: Reinräume und zugehörige Reinraumbereiche – Teil 9: Klassifizierung der ...

